[Lego Robots] [Groups] [Lab Hours] [First Project] [Second Project] [Challenge]
The kits contains an assortment of parts some or all of which you can use to build your robot. There is no restriction on what you can build except that it can only be constructed with the parts you have been given.
If you want to use additional parts (for instance because you need an extra three grommets to build the robot of your dreams), come and see me, and we can discuss if you can have some extra components. (I will only agree if the parts you want are essential to what you robot is doing and don't give the robot an unfair advantage.)
You will need to download the current version of Not Quite C (NQC) (version 2.4 r2 or higher) for the platform you intend to use.
You can also download the User Manual and Programmer's Guide for Not Quite C.
You might also be interested in the Bricx Command Center which is an integrated development environment for NQC (I prefer to use the old-fashioned combination of text editor and compiler).
Another tihng you'll need to download is the driver for the USB tower that you use to download programs into the robot.
Finally, Aaron Gibbs has put together a LEGO Mindstorms page which include information on how to get started, how to use NQC, and has a bunch of sample programs that you might like to look at.
[Lego Robots] [Groups] [Lab Hours] [First Project] [Second Project] [Challenge]
TBA
[Lego Robots] [Groups] [Lab Hours] [First Project] [Second Project] [Challenge]
You increase your chances of using the lab when you want if this fits with my schedule. This semester I'm on campus for most of every Monday, Wednesday and Friday. If you choose a time on those days you'll probably be okay.
For the two weeks leading up to the challenge, there will be extra hours that the lab is open:
| Mon | Nov | 21 | 6pm-8pm |
| Tue | Nov | 22 | 9.25am-2pm |
| Wed | Nov | 23 | 11.30am-1.30pm |
| Mon | Nov | 28 | 2-4pm |
| Tue | Nov | 29 | 1-4pm |
| Wed | Nov | 30 | 11.30am-1.30pm |
[Lego Robots] [Groups] [Lab Hours] [First Project] [Second Project] [Challenge]
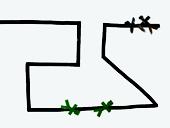
The course will look like:
The course is built on white foamcore, and the line is "drawn" with black electrical tape. There are figures "drawn" in green tape and aluminum foil. All of these elements give different readings on a light sensor.
A course which incorporates these elements will be provided for you to practice on with the robots. This will be placed in Ingersoll 5301 for you to use. We will set up a schedule of times that this room is open for you.
At the end of the project these robots will compete over this kind of course; the aim is to complete the course in the minimum time.
Doing badly in the competition will not hurt your grade for the project, but doing well in the competition may increase your grade for the project.
The robot control programs should be written in the "stimulus-response" style we discussed in Lecture 3.
They describe the procedure that will be followed during the competition.
Place the robot at the end of the black line where the line touches the edge of the board.
Let the robot start line-following and start timing.
At some point between the third and fourth corners place an object (for example a box).
When the robot touches the object, it should stop, back up slightly and wait
When the robot has stopped after backing up, remove the object.
When the robot reaches the green figures it should play a sound.
When the robot reaches the silver figures, stops, and plays a second sound (to show it recognises the silver patch) stop the clock.
NOTE:
Each report should be 4-5 pages long (standard letter paper, 10-12pt type, single spaced), and should describe the design of the robot and the design of the code which controls the robot.
You must not only describe the design choices made, but also justify them.
In addition to the 4-5 pages of report, you must submit two other items:
The Sumo course is as below:
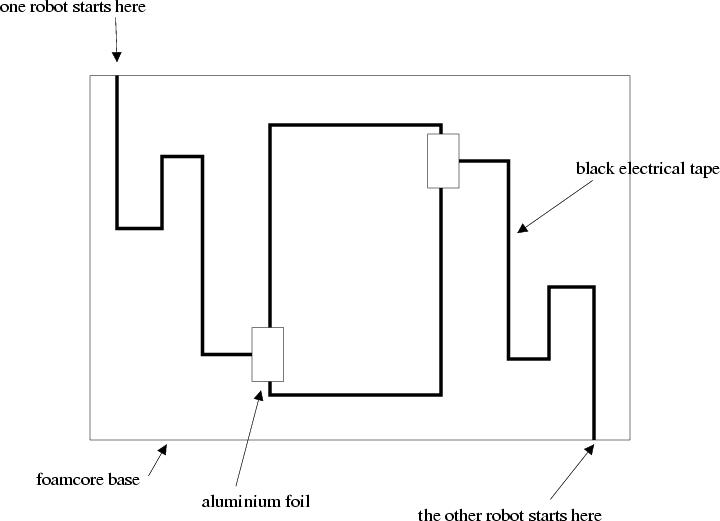
The course will be built on a large piece of foamcore. About a third of this will be the sumo ring, marked by a rectangle of black electrical tape.
Each robot will have to follow a winding path to the ring from its start position. This path will be (almost) exactly the same for both robots.
The point at which the path meets the ring will be marked with a sqaure of aluminium foil; this gives a light reading above that of the white foamcore and is typically very easy to detect.
Each robot will have to carry the same light source we used for the previous project so that both robots can "see" each other.
The rules of the sumo contest are as follows.
Each report should be 4-5 pages long (standard letter paper, 10-12pt type, single spaced), and should describe the design of the robot and the design of the code which controls the robot.
You must not only describe the design choices made, but also justify them.
In addition to the 4-5 pages of report, you must submit two other items:
[Lego Robots] [Groups] [Lab Hours] [First Project] [Second Project] [Challenge]
The competition will be on December 1st between 1.30 and 3.30.
Both the pitch and the ball are designed to simplify the task of playing soccer.
The pitch is a standard RoboCupJunior one-on-one soccer pitch. This has a floor which is a greyscale. Thus one end of the pitch is black, the other is white, and the colour gradient "slopes" from one to the other. You can use a light sensor (just like you used it in the first project) to tell which end of the field is which and which way the robot is heading.
You can find a more detailed description of the pitch on the RoboCupJunior website, where the full Soccer rules are given.
The pitch also has walls, so the ball cannot leave the pitch and the robot can detect (using a bump sensor) when it is at a wall.
The ball emits infra-red light, so you can use a light sensor to find the ball.
The rules for the competition will be the usual RoboCupJunior rules, but the games will be shorter, around 5 in total.
However, you can also do the challenge as an extra credit project.
Everyone who wants extra credit has to submit a project report which is their own work (and we will be checking that group members have not just cut and pasted between reports), just like for the other projects.
Each report should be 4-5 pages long (standard letter paper, 10-12pt type, single spaced), and should describe the design of the robot and the design of the code which controls the robot.
You must not only describe the design choices made, but also justify them.
In addition to the 4-5 pages of report, you must submit two other items: