More specifically we will work through a graduated series of projects that use the Player/Stage suite.
I'll provide computers with all the necessary software installed. If you want to set up your own machine (either to bring to class or to work on the projects at home), then here are some instructions.
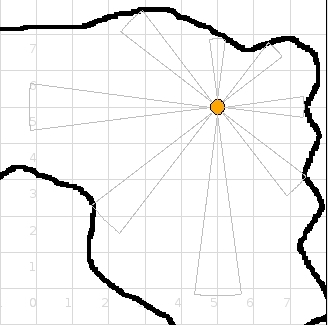
We'll start with a simple simulated robot running in a simple environment, and hopefully progress to running programs on a real robot.
The attentive reader will realise that the controller we discussed in Lecture 3, is probably a good basis for implementation.
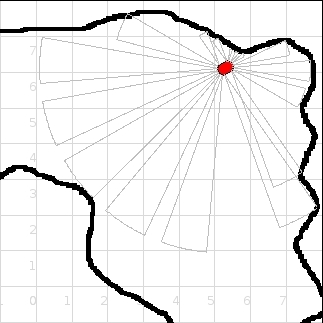
Since the Pioneer has more sensors than the robot we used for Project I, it is easier to handle the task, and it is possible to deal with a more complex environment.
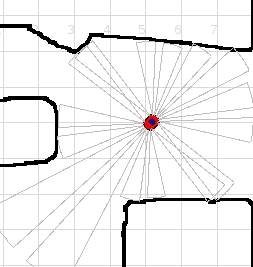
Of course, while it is doing this, it also needs to use its sensors to avoid obstacles.
By "plan" we mean a list of points that the robot must go through such that there are no obstacles to avoid between points.
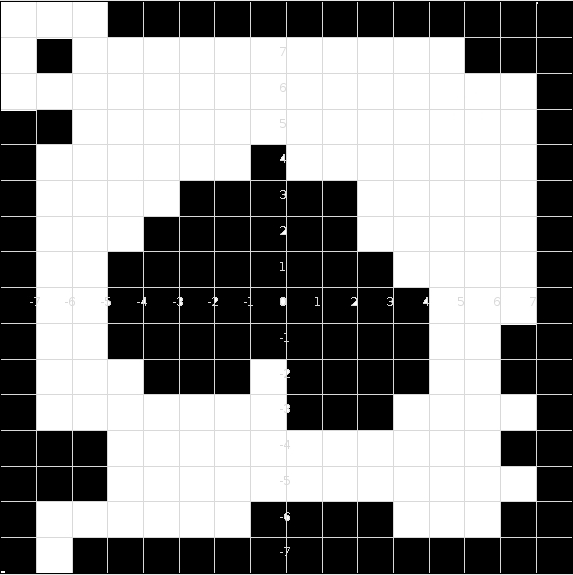
Above is an ocupancy grid map of the simulated space we used before.
Groups and tasks
Based on my understanding of everyone's preferences, I assigned the groups to the following tasks.
| Group | Task | |
| Dmitry and Daniel | Build map | |
| Sergey and Orville | Build map | |
| Carlyle and Yanbo | Create plan | |
| Stephen and Lawrence | Create plan | |
| MIriam and Benjamin | Follow plan | |
| Hermes and Mitch | Follow plan |