Adding a motion sensor an AIBO
The first step in the project was to get experience of using vestibular feedback to control the motion of a robot's head. We opted to do this on a Sony AIBO, since this was a robot we had experience working with.Here is the original modified AIBO, with a head-mounted sensor that can detect velocity and acceleration in three dimensions.
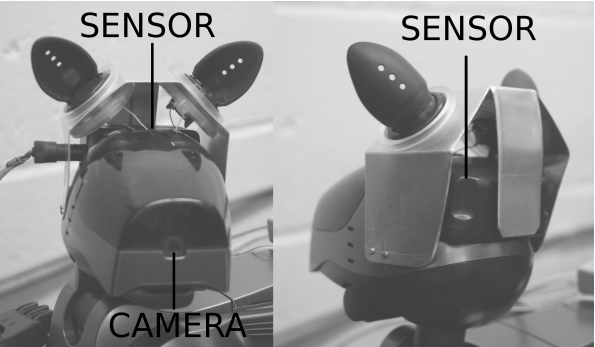
The sensor is mounted as close as possible to the point about which the head rotates. We had to put the ears back on the head after adding the sensor because at the time we couldn't get the AIBO to boot up without its ears attached.
Adding cameras to the AIBO
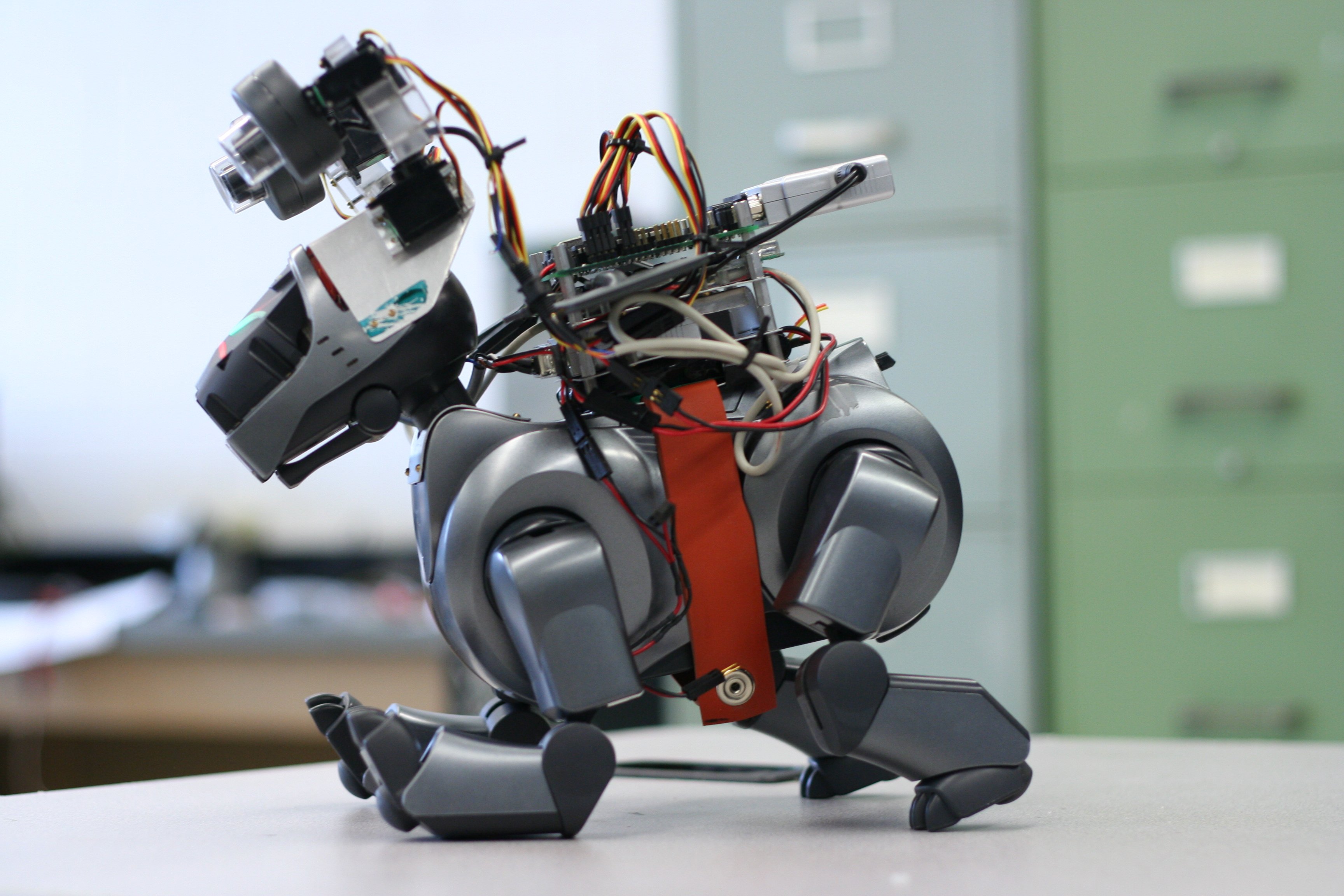
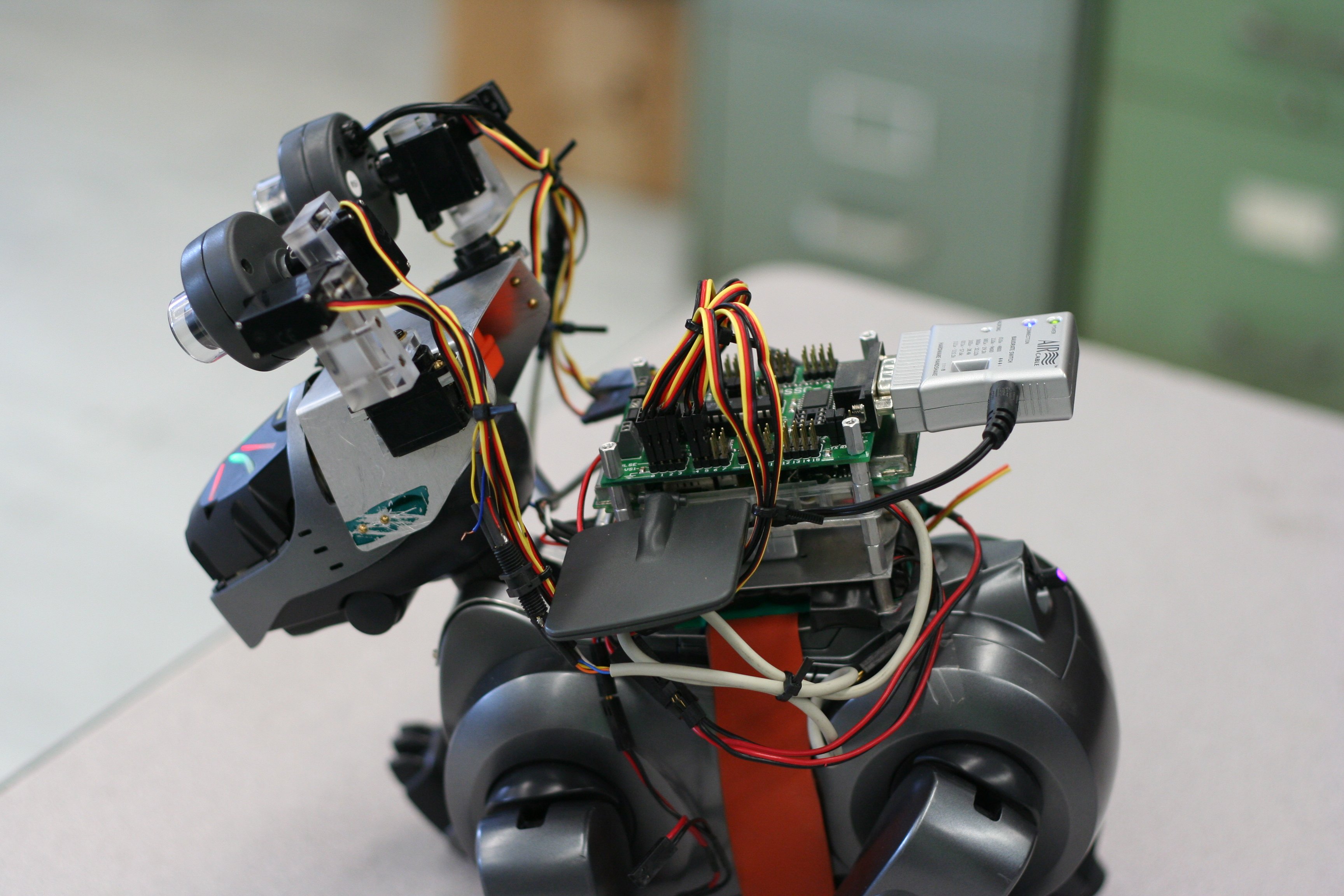
The next step in development was to add cameras that can move independently of the head of the robot --- this allows us to implement and artificial vestibular-ocular reflex and an artificial vestibular-colic reflex.These are some views of the robot that show the whole assembly:
 |
 |
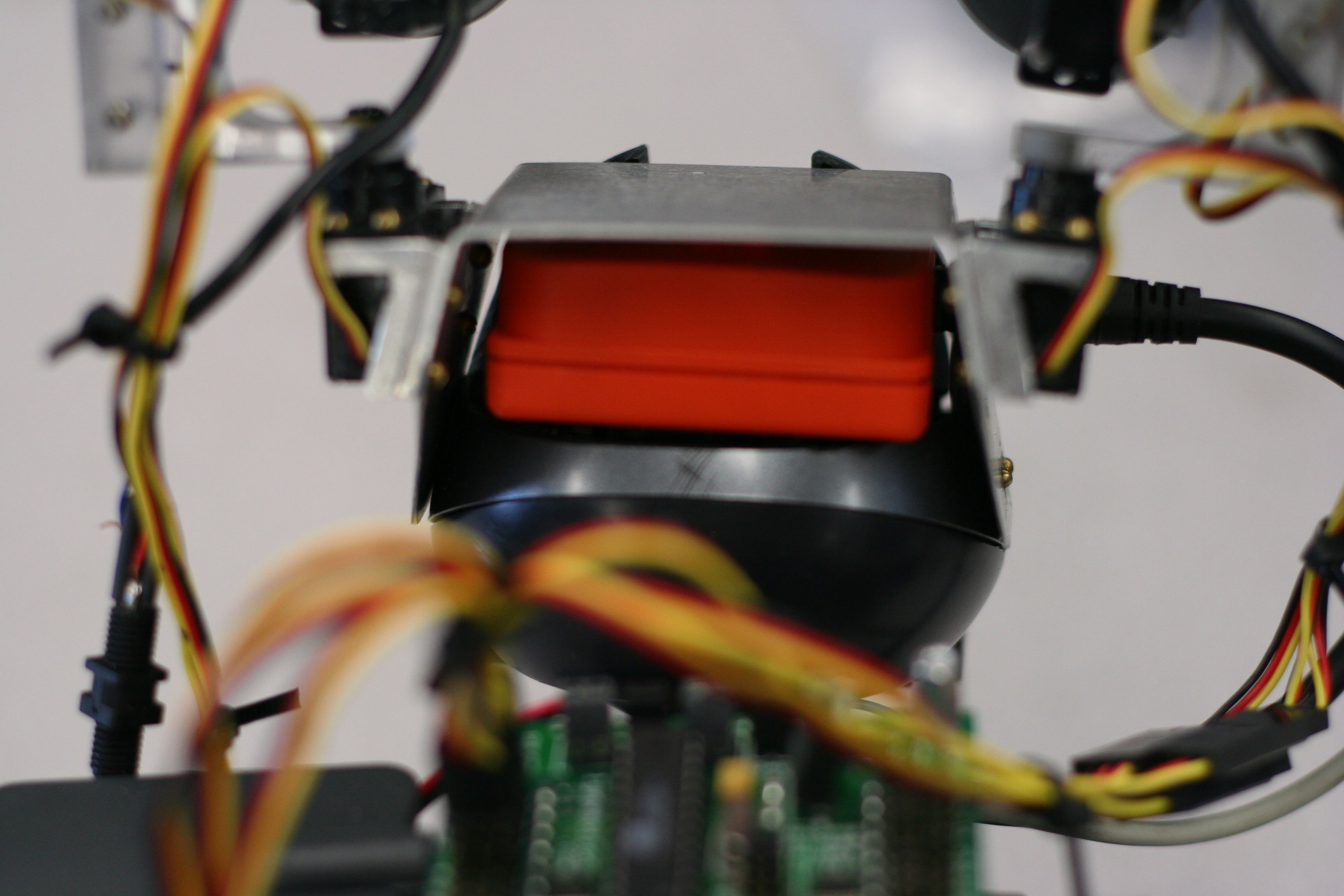
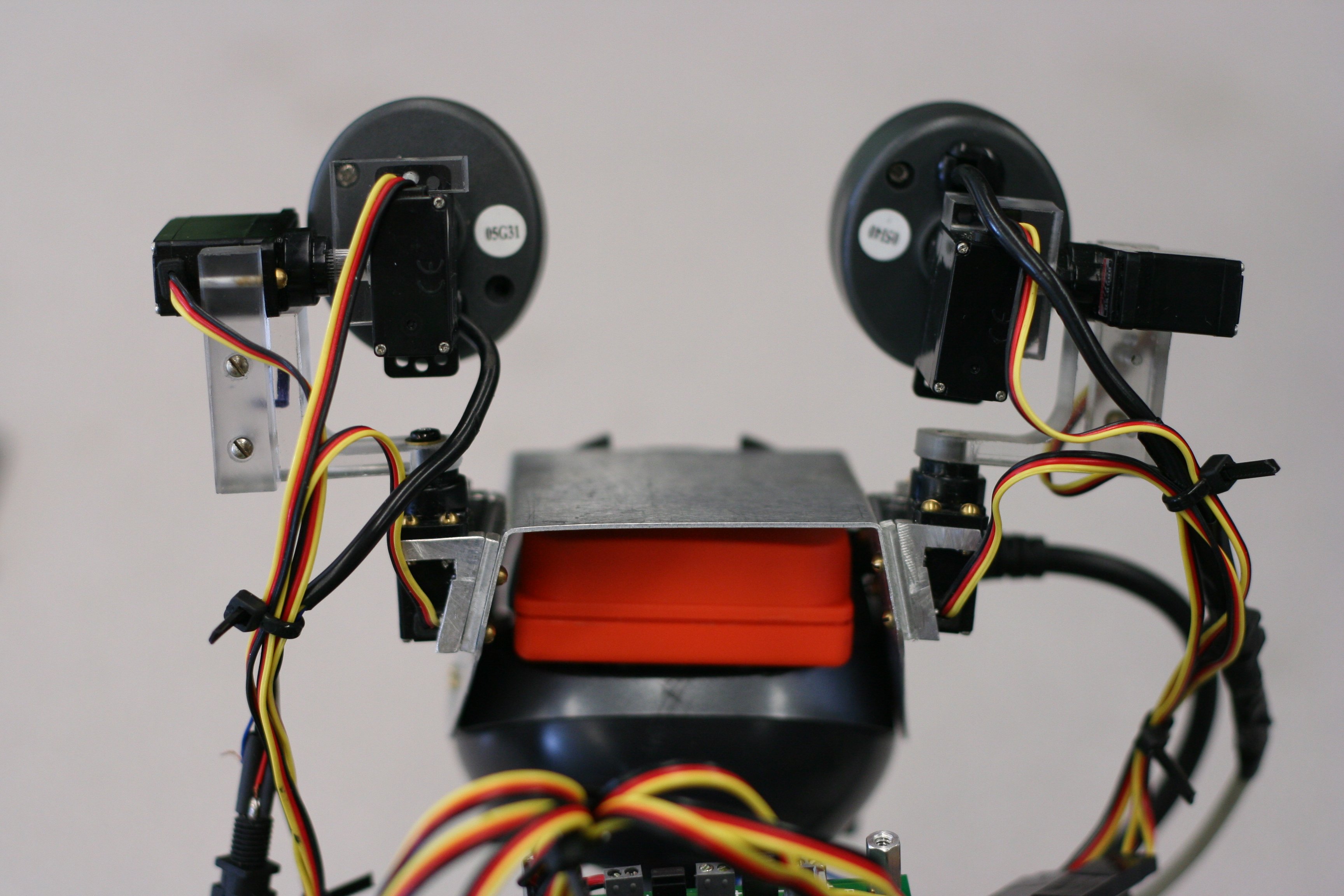
A view of the setup from the front
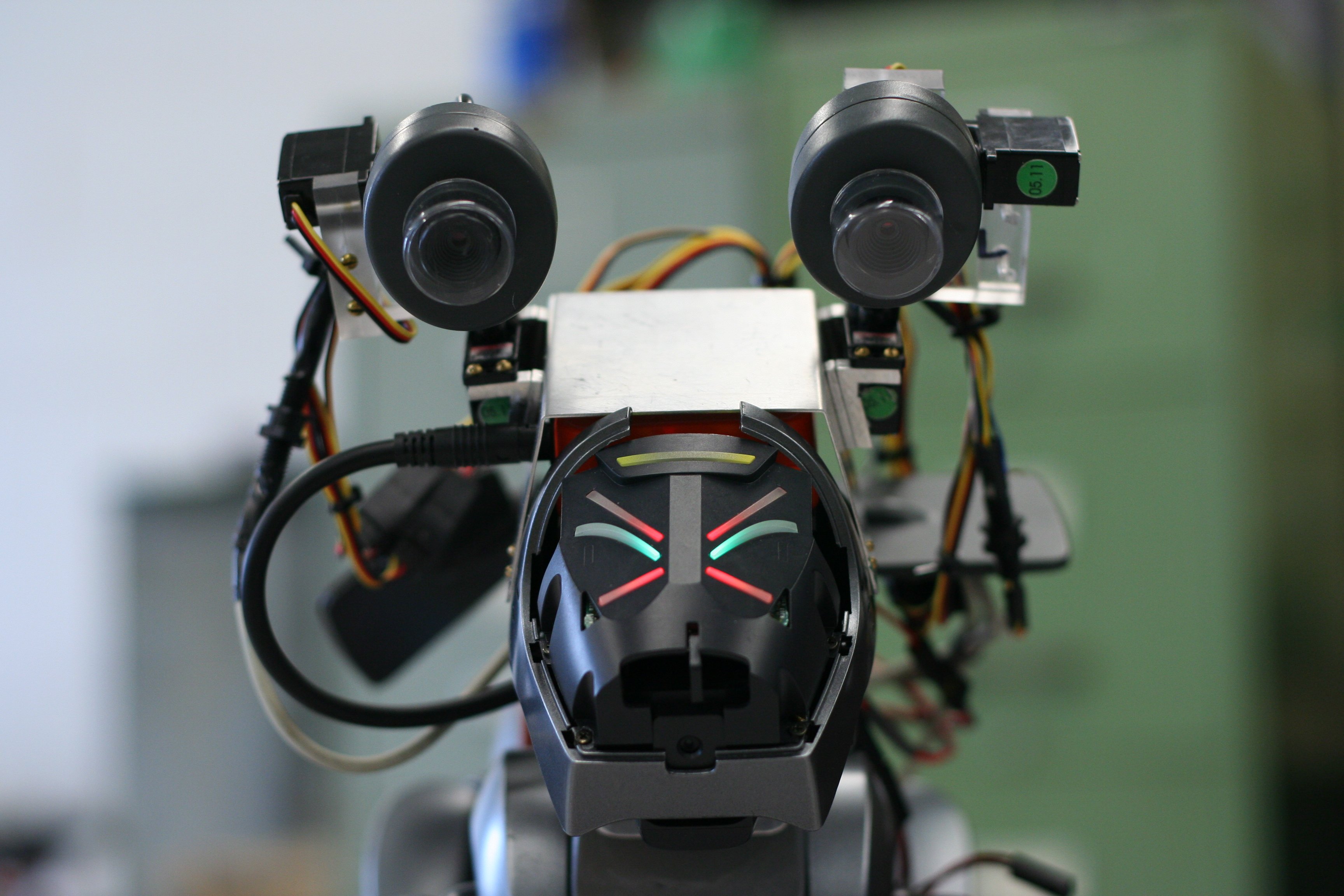
and a closeup of one of the cameras:
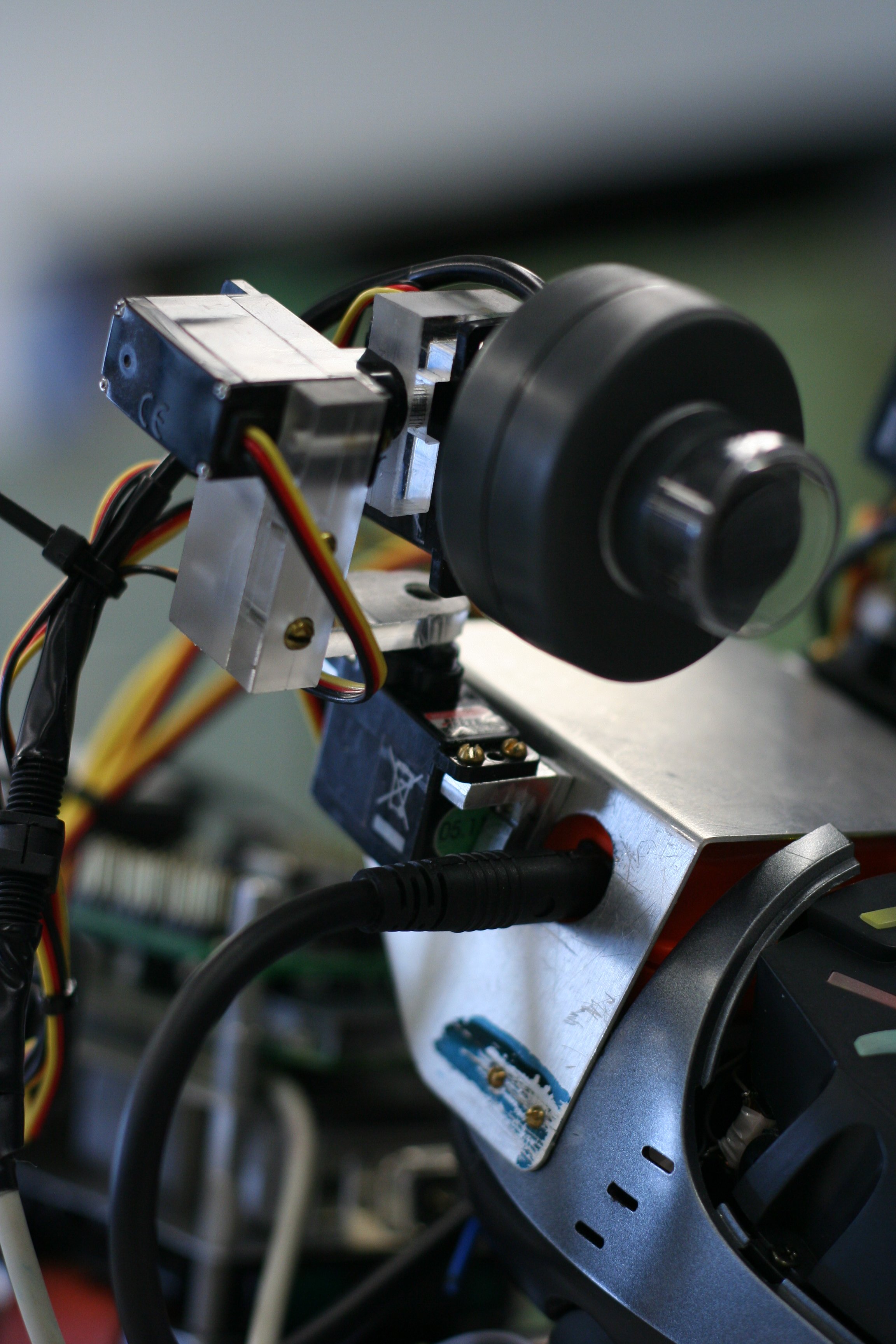
The cameras you see here are cheap security cameras. The main reason for using them is that they are wireless, and relatively small.
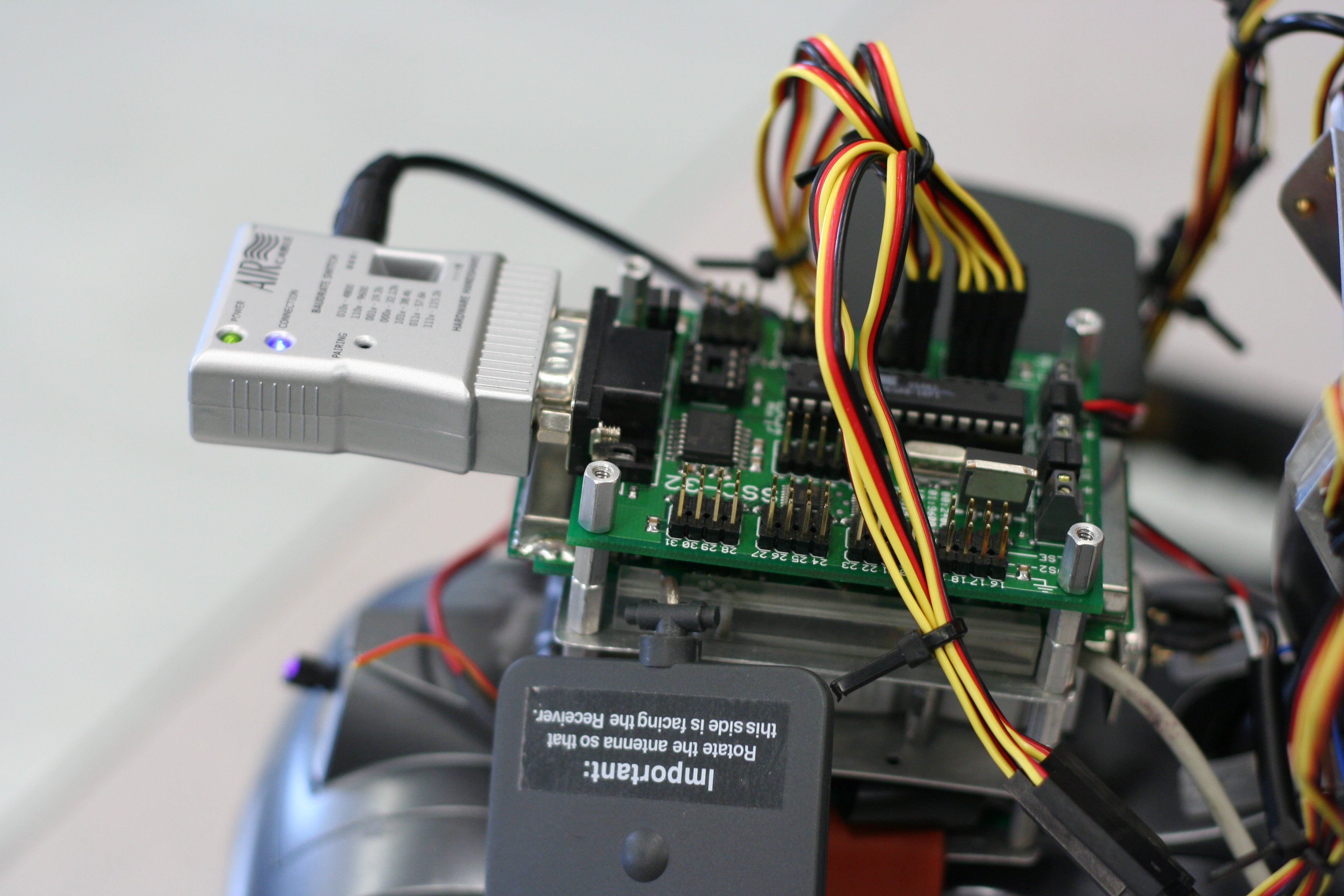
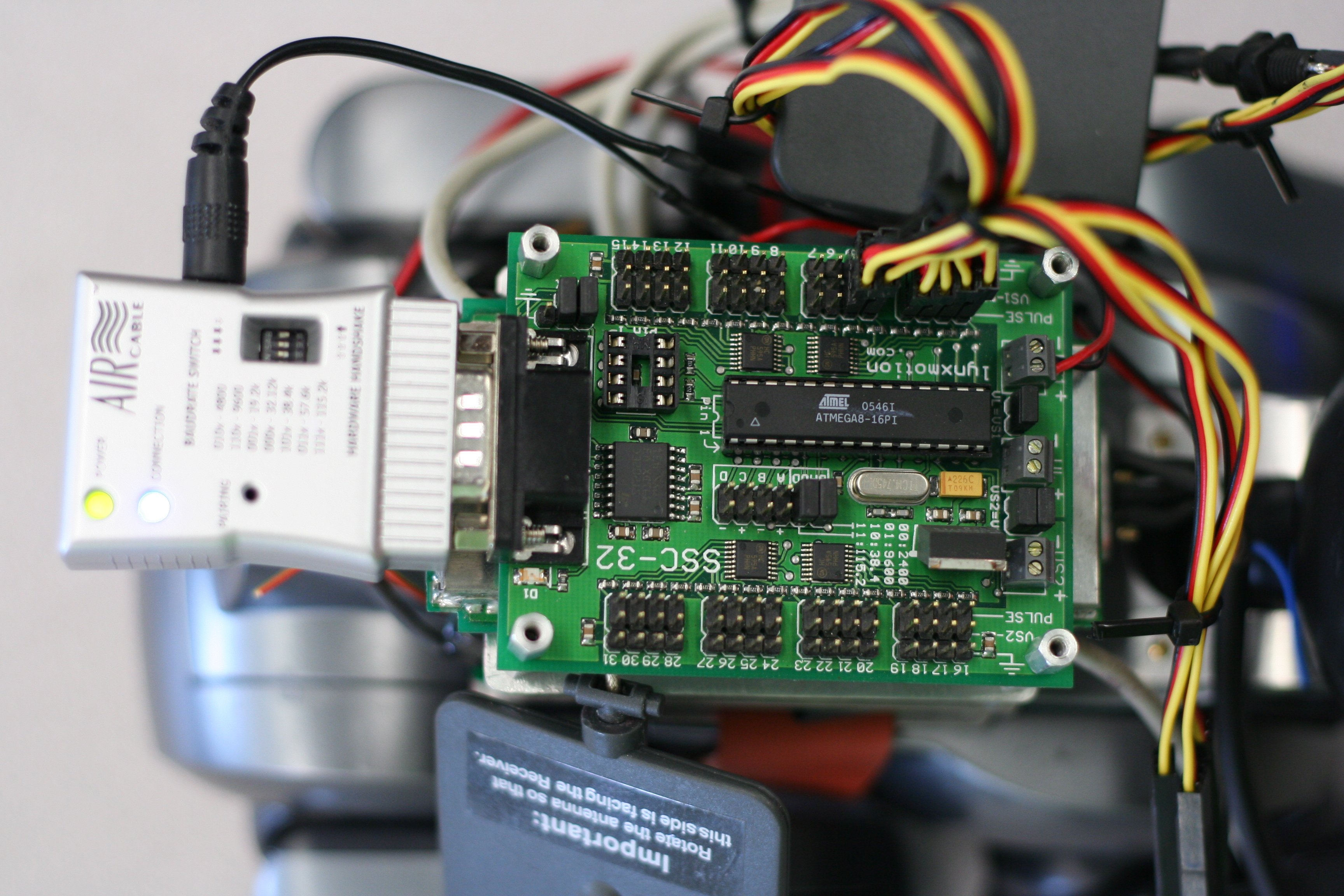
The AIBO doesn't have enough on-board computation to be able to process data form the sensor and control the cameras, so these communicate with an off-brad computer. The "backpack" allows this communication to be wireless so that the robot operates untethered.
 |
 |
The motion sensor is still tucked in the head, now under the whole camera assembly.
 |
 |