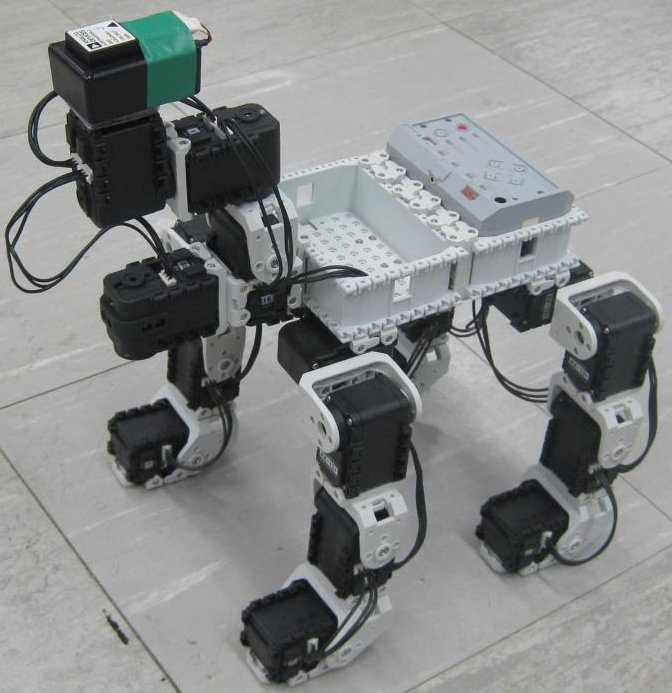
This is the photo gallery of the current state of the project which uses a robot based on the Bioloid Expert.
we incorporated inertial sensors in a Bioloid quadrupedal robot's head and implemented simple stabilization algorithms for the head:
On this platform we have then implemented endpoint control algorithms of the limbs and optimized the joint angle dynamics based on the data that was collected in the monkey walking on a treadmill.
The robot has four joints for each limb, which provide pitching and rolling at the hip/shoulder and pitching at the knee and the ankle. It also has the capability of performing heel contact and toe lift in accordance with projected behavior from the monkey data. The head of the robot is composed of three joints which facilities yaw, pitch and roll movements. A simple model-based control system helps maintain the head stability in space during locomotion as well as modifying the dynamics of stepping to maintain correct heading as specified by the head gaze.
The system not only shows that sensor-based control that mimics vestibular behavior is important for maintaining heading, but the model system has the potential to be used for exploring possible neural control schemes during locomotion and as an aid in designing rehabilitation strategies.
We also have photographs of earlier work on the Aibo and iHs02s robots.